Гаджеты
-
 1-3 Декабря 2009 г состоится научно-практическая конференция, посвященная развитию отечественной наноиндустрии.
1-3 Декабря 2009 г состоится научно-практическая конференция, посвященная развитию отечественной наноиндустрии. 1–3 декабря 2009 г. в г...
-
 10 Безумных гаджетов для отправки сообщений
10 Безумных гаджетов для отправки сообщений Стилус-насадка для носа — гаджет для тех, кто постоянно мечтал иметь лишний палец на лице...
-
 10 Безумных периферийных устройств для компьютера
10 Безумных периферийных устройств для компьютера Titan Sphere — продукт скоро разорившейся компании SGRL, неудавшаяся попытка сообщить новое слово в сфере джойстиков...
-
 10 Безумных японских изобретений
10 Безумных японских изобретений Раструбы для глазных капель разрешают совершенно верно прицелиться в глаз, в то время, когда необходимо его чем-то зака...
-
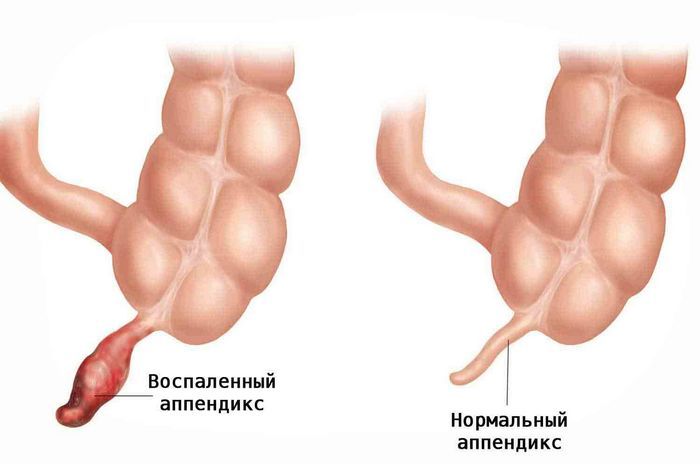 10 Бесполезных органов человека
10 Бесполезных органов человека Существуют ли в действительности ненужные органы? Вряд ли кому-то захочется расстаться со своим аппендиксом , пока он е...
-
 10 Важнейших стадий развития персональных компьютеров
10 Важнейших стадий развития персональных компьютеров «Мать всех демонов», 1968 год...
-
 10 Вариантов будущего через тысячу лет
10 Вариантов будущего через тысячу лет Будущее с инопланетянами — почему бы и нет? Кое-какие уверены, что инопланетяне уже среди нас...
Немного интересного:
-
 Правительство рф утвердило правила субсидирования научно-исследовательских и конструкторских работ для реализации «дорожных карт» нти
Правительство рф утвердило правила субсидирования научно-исследовательских и конструкторских работ для реализации «дорожных карт» нти Распоряжение от 20 декабря 2016 года №1406...
-
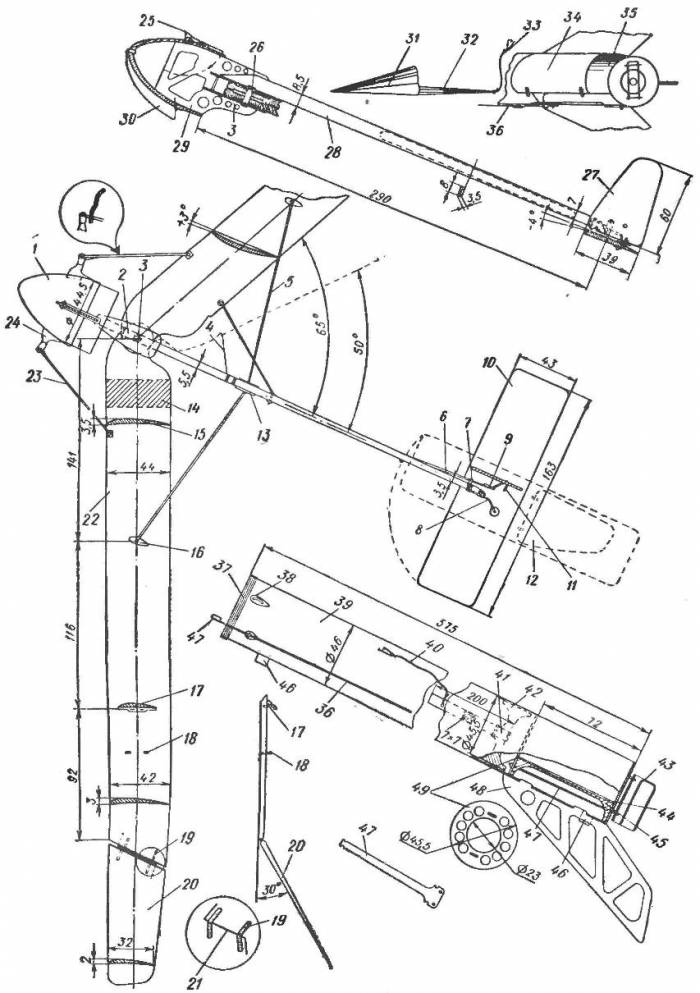 Комплекс: ракета — ракетоплан
Комплекс: ракета — ракетоплан Предлагаемая занимательная модель ленинградских конструкторов Б. Абрамова и В...
-
 Volkswagen xl1 выигрывает конкурс дизайн года
Volkswagen xl1 выигрывает конкурс дизайн года
Необычный и новаторский гибрид в стиле космической эры Volkswagen XL1 победил в споре за обладание призом в категории т...
-
 Как голод побеждает страх и чувство одиночества
Как голод побеждает страх и чувство одиночества Нейрохимический механизм, обслуживающий чувство голода, заставляет с подозрением относиться к своим товарищам и подавляе...
-
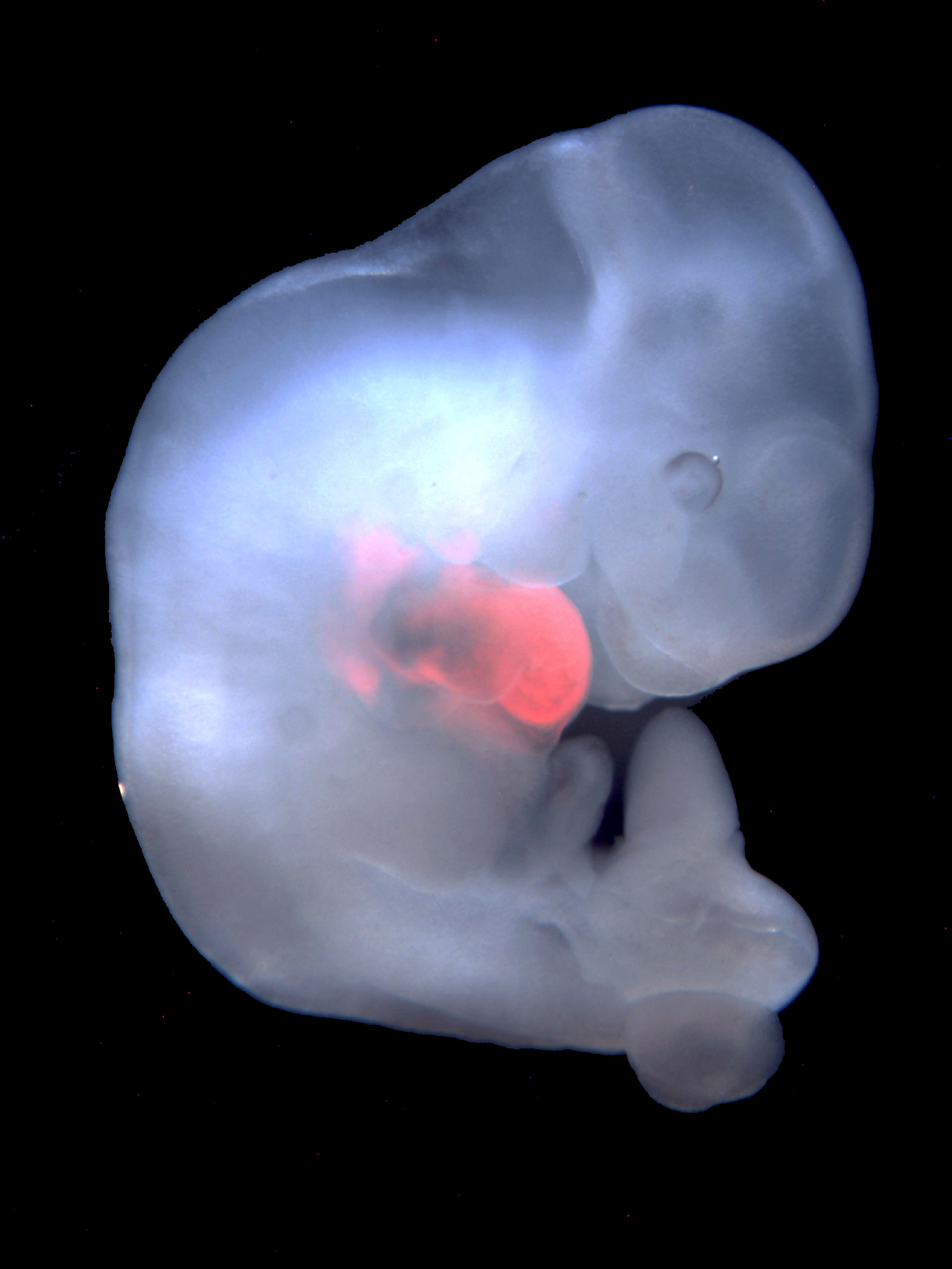 Человека смешали со свиньей
Человека смешали со свиньей Стволовые клетки человека прижились в свином эмбрионе.
Намедни мы говорил...
-
Как превратить жука в робота
14.03.2014
 Наука и жизнь
Наука и жизнь -

Электроды в мышцах ног жука разрешают совершенно верно руководить их перемещениями.
Дабы роботизировать насекомое, вынудить его идти в том направлении, куда нам необходимо, не обязательно попадать в его мозг – достаточно перехватить управление конечностями. Исследователи из Наньянского технологического университета в Сингапуре перевоплотили так в роботов пара особей африканского Mecynorrhina torquata, одного из наибольших жуков в мире, самцы которого достигают 8,5 см в длину.
Жук Mecynorrhina torquata с электродами, подведёнными к передним лапам. (Фото Cao Feng and Hirotaka Sato, Nanyang Technological University, Singapore.) Самцы Mecynorrhina torquata достигают 8,5 см в длину. (Фото cetoniaworld / Flickr.com.)‹ ›
Сперва Хиротака Сато (Hirotaka Sato) и его сотрудники проанализировали перемещения лапок жука, в то время, когда он идёт – это необходимо было чтобы понять последовательность работы мышц ног. После этого в мускулатуру передних лап внедрили восемь пар электродов, по электроду на каждую мышцу.
") В статье в Journal of the Royal Society Interface авторы пишут, что электрическими импульсами, подаваемыми в определённом порядке, возможно хватало совершенно верно руководить мускулатурой жука, регулируя длину и частоту шага. (В случае если функционировать через центральную нервную совокупность, подавая импульсы на антенны либо же конкретно в мозг, то всецело руководить насекомым не выйдет – к примеру, осуществлять контроль через мозг скорость перемещения пока не получается.)
В статье в Journal of the Royal Society Interface авторы пишут, что электрическими импульсами, подаваемыми в определённом порядке, возможно хватало совершенно верно руководить мускулатурой жука, регулируя длину и частоту шага. (В случае если функционировать через центральную нервную совокупность, подавая импульсы на антенны либо же конкретно в мозг, то всецело руководить насекомым не выйдет – к примеру, осуществлять контроль через мозг скорость перемещения пока не получается.)В возможности исследователи желают «электрифицировать» у M. torquata все шесть ног, а заодно снабдить его особым датчиком, что разрешал бы отслеживать положение насекомого в пространстве и направлять его в нужную сторону.
По большому счету мысль создать «робота-насекомое» в далеком прошлом обладает умами биотехнологов и инженеров, всё-таки насекомые – это одни из самых идеальных организмов, каковые сумели приспособиться к самым различным условиям. Всецело скопировать их строение, сделать, грубо говоря, неестественного жука либо муху, у нас пока не выходит. (Не смотря на то, что многие конструктивные ответы насекомых однако удаётся перенести на механизмы – так, мы сравнительно не так давно писали о тараканообразном роботе, которого так же тяжело раздавить, как и настоящего таракана.)
Однако тут возможно поступить в противном случае – сделать киборга из настоящего насекомого, к примеру, как при с жуком M. torquata. Но, это не первая работа для того чтобы рода, пара лет назад исследователи из Корнельского университета проделали что-то подобное с табачным бражником, внедрив электроды в мускулы крыльев бабочки, так что её полётом возможно было руководить – до некоей степени.
Насекомым-киборгам возможно отыскать массу применений; первыми на ум приходят, само собой разумеется, разнообразные разведывательные задания. Всецело неестественным роботам они уступают в сроке работы – всё-таки живые жуки, бабочки, тараканы и пр., как-никак, смертны – но иначе, размножать их всё-таки несложнее и дешевле; помимо этого, с энергетической точки зрения, насекомые, пускай и с электроникой внутри, потребляют в 100 раз меньше энергии, чем цельный робот таких же размеров.
По данным LiveScience.
Создатель: Кирилл Стасевич
Источник: nkj.ru
Случайные записи:
Робот-жук своими руками из зубной щетки.
Похожие статьи, которые вам понравятся:
-
Мы довольно часто наблюдаем разные фантастические фильмы либо читаем книги о приключениях в далеких галактиках, но такое будущее уже прейдет скоро. В…
-
Cmmworm — уникальный мягкий робот, конструкция которого скопирована со строения тела земляного червя
Исследователи из университета Кейс Вестерн Резерв (Case Western Reserve), возглавляемые Эндрю Хорчлером (Andrew Horchler), создали неповторимого…
-
Онлайн-инструментарий поможет всем желающим создавать мягких роботов
Из года в год роботы всё больше входят в нашу жизнь. Они трудятся на фабриках (и подчас готовы совершить революцию в производстве), исследуют другие…
-
В этом видеокурсе канала паяльник tv будут рассматриваться конструкции и схемы несложных роботов. На данный момент многие интересуются классом beam…
-