Гаджеты
-
 1-3 Декабря 2009 г состоится научно-практическая конференция, посвященная развитию отечественной наноиндустрии.
1-3 Декабря 2009 г состоится научно-практическая конференция, посвященная развитию отечественной наноиндустрии. 1–3 декабря 2009 г. в г...
-
 10 Безумных гаджетов для отправки сообщений
10 Безумных гаджетов для отправки сообщений Стилус-насадка для носа — гаджет для тех, кто постоянно мечтал иметь лишний палец на лице...
-
 10 Безумных периферийных устройств для компьютера
10 Безумных периферийных устройств для компьютера Titan Sphere — продукт скоро разорившейся компании SGRL, неудавшаяся попытка сообщить новое слово в сфере джойстиков...
-
 10 Безумных японских изобретений
10 Безумных японских изобретений Раструбы для глазных капель разрешают совершенно верно прицелиться в глаз, в то время, когда необходимо его чем-то зака...
-
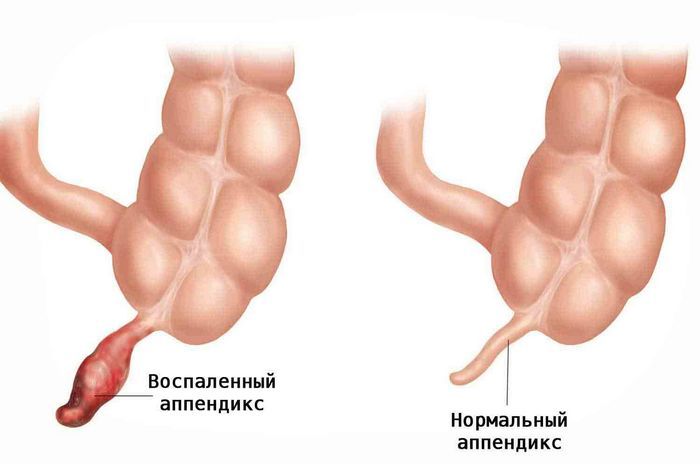 10 Бесполезных органов человека
10 Бесполезных органов человека Существуют ли в действительности ненужные органы? Вряд ли кому-то захочется расстаться со своим аппендиксом , пока он е...
-
 10 Важнейших стадий развития персональных компьютеров
10 Важнейших стадий развития персональных компьютеров «Мать всех демонов», 1968 год...
-
 10 Вариантов будущего через тысячу лет
10 Вариантов будущего через тысячу лет Будущее с инопланетянами — почему бы и нет? Кое-какие уверены, что инопланетяне уже среди нас...
Немного интересного:
-
 Солнце поможет мужчинам зачать
Солнце поможет мужчинам зачать Недавнее изучение методов бесплодия борьбы и причин мужчин с этим явлением распознало определенную закономерность, котор...
-
 Передатчик и приемник для самолета на радиоуправлении
Передатчик и приемник для самолета на радиоуправлении Сейчас мы поболтаем о аппаратуре. Это приёмник и передатчик для модели самолета, функционирующего на радиоуправлении...
-
 В москве состоится заседание комиссии рф и венгрии по торговому сотрудничеству
В москве состоится заседание комиссии рф и венгрии по торговому сотрудничеству В правительстве РФ состоится очередное совещание Венгрии и межправительственной комиссии России по сотрудничеству в обла...
-
 Ульяновская область и роснано будут сотрудничать
Ульяновская область и роснано будут сотрудничать 27 и 28 августа в Ульяновской области трудится начальник дирекции по сотрудничеству с федеральными и региональными власт...
-
 Выросла доля высокотехнологических проектов в инвестициях рф во францию
Выросла доля высокотехнологических проектов в инвестициях рф во францию «Я не знаю второй страны, с которой бы у нас был совместный рецепт, в заглавии которого – обе наши государства: в 1892 б...
-
Ученые разрабатывают искусственные мышцы из электроактивных полимеров
17.11.2011
 Hi-tech
Hi-tech -

Команда ученых из американских, японских и корейских университетов исследует возможность 3D-печати эластичных роботизированных приспособлений. В долговременной возможности исследователи сохраняют надежду применить наработки для неестественных аналогов мышечных тканей.
Роботы, 3D-печатные и не весьма, уже могут делать массу нужных задач: делать уборку, строить машины а также дискутировать о сущности бытия. Но у фактически всех роботов имеется неспециализированная черта, часто ограничивающая их возможности – жесткость конструкции.
Тогда как люди-человеки способны делать всевозможные хитроумные перемещения благодаря свойственной им мягкотелости, роботы в большинстве случаев изготавливаются из твёрдых, стойких к деформации материалов, по определению ограничивающих маневренность в тесных местах и гибкость перемещений в целом. Так, для развития более талантливой робототехники нужно принять на вооружение эластичные, эластичные материалы, наделенные механической функциональностью.
")
Одним из наиболее значимых направлений в «мягкой» робототехнике есть создание неестественных мускулов, каковые имели возможность бы применяеться не только в робототехнике, но и продвинутом протезировании. До тех пор пока что обстановка с неестественными конечностями такова, что существует много механических и бионических аналогов, снаружи похожих на настоящие руки, но неспособных к естественным перемещениям.
Подобные манипуляторы по-своему очень действенны, но интегрировать их в человеческий организм возможно затруднительно. Кван Ким, доктор наук из Университета Невады в Лас-Вегасе, сравнительно не так давно организовал исследовательский проект, направленный на разработку реалистичных робо-мышц, талантливых революционизировать технологии протезирования. Для этого ему и его команде было нужно не только подобрать подходящий материал, но и отыскать изготовления и способы управления.
В качестве производственного способа была выбрана 3D-печать.
В первую очередь его команде и Киму было нужно искать материал, владеющий прочностью и достаточной гибкостью, но наряду с этим поддающийся управлению извне. Вероятных вариантов выяснилось достаточно большое количество, но исследователи решили остановиться на ионных полимер-железных композитах. Эти синтетические материалы являются электроактивные полимеры, другими словами владеют свойством изменять форму под действием электрического напряжения.
Электроактивные полимеры имеют пара нужных изюминок. Во-первых, ими возможно руководить посредством электрических импульсов, а во-вторых, они же смогут быть использованы для обратной связи, другими словами в качестве датчиков перемещения. Наконец, ими возможно печатать, что делает вероятным изготовление компонентов любой требуемой формы.
На данный момент ученые трудятся над масштабированием 3D-печатного процесса и изучением новых способов управления полимерными «мышцами». Так как «мягкая» робототехника остается очень юный дисциплиной, сами исследователи не уверены, что им предстоит отыскать.
«Ежедневно я определю что-то новое», – резюмирует Ким.
Проект финансируется Национальным научным фондом США в рамках программы Международного научно-образовательного сотрудничества (PIRE). В проекте принимают участие исследователи из Корейского университета передовой технологий и науки (KAIST) и Национального университета передовых промышленных технологий и наук Японии (AIST).
Случайные записи:
- Новый вид объемных дисплеев: возможный шаг к массовому производству компьютерных мониторов
- Отчетность ао «роснано» по мсфо за 6 месяцев 2016 года соответствует долгосрочной программе развития компании
Ученый из Благовещенска создал искусственные мышцы
Похожие статьи, которые вам понравятся:
-
Искусственные мышцы на основе нанотрубок
Углеродные нанотрубки сейчас рассматриваются исследователями и учёными в качестве базы для электроники нового поколения, в разы более скоростной, нежели…
-
Ученые создали искусственную медузу
Американские ученые сравнительно не так давно создали неестественную плавающую медузу. Исследователи забрали за базу силикон, на котором вырастили клетки…
-
Графеноподобный пористый полимер
Исследовательская несколько Андрея Гейма (Andre Geim) совместно с сотрудниками из Университета Полимеров Макса Планка (Майнц, Германия) в первый раз…
-
Роснано инвестирует в создание производства наноматериалов на основе крупнотоннажных полимеров
Наблюдательный совет РОСНАНО одобрил участие Корпорации в проекте по созданию современного импортозамещающего производства наноматериалов на базе больших…