Гаджеты
-
 1-3 Декабря 2009 г состоится научно-практическая конференция, посвященная развитию отечественной наноиндустрии.
1-3 Декабря 2009 г состоится научно-практическая конференция, посвященная развитию отечественной наноиндустрии. 1–3 декабря 2009 г. в г...
-
 10 Безумных гаджетов для отправки сообщений
10 Безумных гаджетов для отправки сообщений Стилус-насадка для носа — гаджет для тех, кто постоянно мечтал иметь лишний палец на лице...
-
 10 Безумных периферийных устройств для компьютера
10 Безумных периферийных устройств для компьютера Titan Sphere — продукт скоро разорившейся компании SGRL, неудавшаяся попытка сообщить новое слово в сфере джойстиков...
-
 10 Безумных японских изобретений
10 Безумных японских изобретений Раструбы для глазных капель разрешают совершенно верно прицелиться в глаз, в то время, когда необходимо его чем-то зака...
-
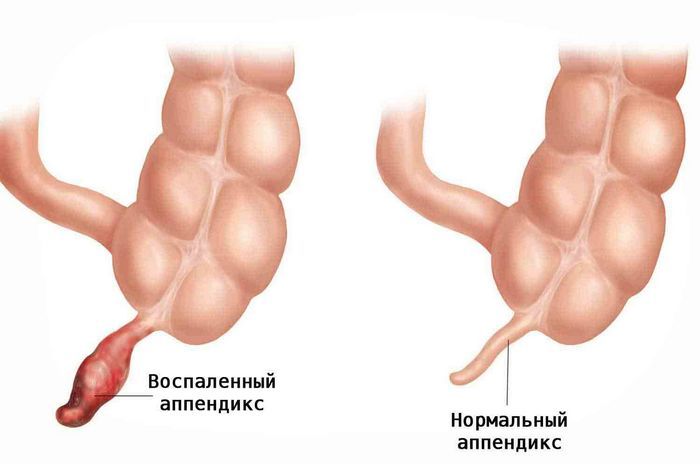 10 Бесполезных органов человека
10 Бесполезных органов человека Существуют ли в действительности ненужные органы? Вряд ли кому-то захочется расстаться со своим аппендиксом , пока он е...
-
 10 Важнейших стадий развития персональных компьютеров
10 Важнейших стадий развития персональных компьютеров «Мать всех демонов», 1968 год...
-
 10 Вариантов будущего через тысячу лет
10 Вариантов будущего через тысячу лет Будущее с инопланетянами — почему бы и нет? Кое-какие уверены, что инопланетяне уже среди нас...
Немного интересного:
-
 Днк родительской заботы
Днк родительской заботы Родительское поведение у зверей запрограммировано в геноме, причем материнская забота отличается по комплекту генов от о...
-
 В крыму обследовали затонувшее судно xiii века
В крыму обследовали затонувшее судно xiii века Корабль, взявший условное наименование «Форосский византиец», прекрасно сохранился за счет того, что залегал на громадно...
-
 Археологическое лето: главные российские находки
Археологическое лето: главные российские находки «жизнь и Наука» продолжает рассказ о самых занимательных открытиях прошедшего полевого сезона...
-
 7 Теорий о возникновении жизни на земле
7 Теорий о возникновении жизни на земле По подсчетам ученых, жизнь на земле зародилась около 3 миллиардов лет назад: за это время несложные организмы развились ...
-
 Созданы самозатеняющиеся дышащие окна, функционирующие как прозрачная батарея
Созданы самозатеняющиеся дышащие окна, функционирующие как прозрачная батарея Группа исследователей из Технологического университета Нанянга (Nanyang Technological University, NTU), Сингапур, создал...
-
Летящая над водой
07.05.2010
 В мире моделей
В мире моделей -
Сейчас мы предлагаем вниманию судомоделистов необыкновенный материал. В случае если большая часть публикаций строилось на базе существующих разработок и было посвящено уже реализованным итогам конструкторского поиска, то настоящая статья инженера-гидродинамика В. Викторова, как бы в противовес им, всецело складывается из одних только «идей».
Но какое количество раз история развития моделизма, да и техники по большому счету, обосновывала жизнеспособность и перспективность кажущихся сначала «бредовыми» разработок! Характерно, что все они на первых порах встречают или активное сопротивление со стороны кроме того умелых спортсменов (возможно, нужно сказать не «кроме того», а «особенно»? Так как богатый опыт — одновременно и достаток, но время от времени и «ограничитель» для всего, что не укладывается в рамки накопленного опыта), или полное пренебрежение.
С для того чтобы вступления начинаем вследствие того что решили рискнуть опубликовать очень спорную по некоторым моментам работу. Рекомендуем прежде, чем вынести о ней суждение, еще и еще раз прикинуть, чего в ней больше: минусов либо плюсов.
В первую очередь — о том, что такое радиоуправляемая судомодель (не копия!) по собственной сути.
В случае если отвлечься от остального, то это — средство для стремительнейшего проведения по заданной на водной поверхности траектории… блока, складывающегося из мотоустановки и бортовой радиоаппаратуры. Столь неожиданное деление модели в целом на «блок» и «средство» позвано тем, что на параметры последнего мы можем воздействовать только в маленьких диапазонах черт мощности двигателя, данных масс и гребного винта силовой радиоаппаратуры и установки.
Что же касается корпуса, то тут допустимая широта конструкторского поиска намного больше. Исходя из этого, дабы психологически несложнее было принимать предлагаемые новшества, условимся вычислять его «средством».
Итак, «средство» для стремительнейшего прохождения расстояния. Исходя из этого определения, какие конкретно же главные требования к нему нужно предъявить прежде всего?
Основное — громаднейшая эффективность применения мощности двигателя как на прямых, так и криволинейных участках траектории, другими словами минимальное сопротивление перемещению на всех режимах.
Подобные предпосылки ведут к тому, что в совершенном варианте корпус должен иметь минимальные размерения!
Лишь тогда его масса и, следовательно, масса всей модели будет приближаться к оптимальным, снабжающим теоретически мельчайшие утраты при удержании модели на водной поверхности в режиме глиссирования. Но данный вывод обычно противоречит требованиям к поведению модели на виражах.
Самое увлекательное, что до последнего времени размерения радиоуправляемых глиссеров именно и считались оптимизированными.
Но проходит последний мировой чемпионат, где фантастические результаты во всех классах показывают китайские спортсмены с непривычно малыми аппаратами, и… вот вам еще один факт ломки устоявшихся канонов проектирования! Так как до сих пор существовало убеждение, что запрещено (категорически!) обеспечить устойчивое перемещение ни облегченной, ни уменьшенной модели (если сравнивать с теми, что используются ведущими спортсменами). Не считаем, что моделисты из Китая не знали об этих канонах.
Вероятнее они попросту шепетильно проанализировали возможности приближения к совершенному минимуму массы и размеров радиоуправляемой — и взяли в итоге желаемый итог.
К сожалению, в ходе проектирования фактически не учитывается, что при данной мощности двигателя и других неизменных параметрах модели ее масса имеет значительно более ответственное значение, чем все другое. Моде-страницы-спортсмены значительно чаще идут «лобовым» методом, снова и снова форсируя мотоустановки.
И забывают наряду с этим, что в условиях устойчивого глиссирования в рамках отечественных данных совсем безразлично, поднять ли мощность, к примеру, вдвое или уменьшить катер во столько же раз — прирост скорости будет однообразен.
Кроме того, легкая модель намного выигрышнее и по динамике разгонов-торможений.
А последнее еще ответственнее если сравнивать с полной быстроходностью, поскольку чуть ли не половину расстояния радиоуправляемый глиссер проходит как раз в таких переходных режимах. Большая часть спортсменов знакомо с этим причиной, и вопрос обеспечения большой динамичности не требует дополнительной акцентации.
")
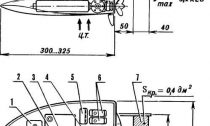
Радиоуправляемая судомодель с двигателем рабочим количеством 3,5 см3:
1 — батарея питания радиоаппаратуры, 2 — топливный бак, 3 — глушитель, 4 — двигатель, 5 — приемник, 6 — рулевые машинки аппаратуры, 7 — антикрыло (стабилизатор), 8 — отражатель, 9 — муфта сцепления.Сравнительные характеристики крыловидных пластин разной формы в плане, но однообразной площади.Сверху — зависимость подъемной силы от угла атаки, снизу — «поляры» (зависимость подъемной сопротивления и силы). Пунктиром продемонстрирован вариант пластины с профилем, имеющим большую кривизну.
Поведение разных моделей при случайном подъеме носовой части корпуса:
А — обводы носовой части типа «спойлер», Б — обводы с поджатием кормовой части днища и носовым «турбулизатором», В — корпус сниженных размеров с антикрылом (стабилизатором). Внизу приведена формула для расчета большой подъемной силы, развиваемой на крыловидной пластине на заданной скорости.
«модель» и Стенд-пуансон для отработки обводов катера.
Древесная рамка затянута узкой резиновой пленкой.
Само собой разумеется, несомненно нужным качеством глиссера есть динамическая устойчивость на всех режимах, в особенности на поворотах. При переизбытке мощности, какая характерна для всех подряд современных радиоуправляемых, в борьбе за увеличение поперечной устойчивости на первый замысел выходит понижение влияния крутящего момента винта. Спортсменами это понято достаточно четко.
Но поиски компромисса между малым упором высоко-оборотного винта и требованиями к упору, как характеристике, определяющей динамику всей (особенно тяжелой!) модели, заставляют сейчас применять редукторы, понижающие обороты двигателя и повышающие момент на винте увеличенного диаметра.
Второй фактор динамической устойчивости — продольная составляющая.
Как она серьёзна, делается светло хотя бы из того, что большинство ведущих спортсменов мира применяет на глиссерах эластичные валы для приведения оси винта к горизонтальному положению. А ведь такая совокупность способна «съесть» до 30 процентов мощности мотоустановки! Но моделисты шли на это, зная, что пока не создано угловых шарниров, удовлетворяющих условиям монтажа узла в потоке перед винтом, и не зная вторых схем.
Как сходу «убить двух зайцев», станет светло при рассмотрении схемы новой модели. Ее преимущества не только в резком понижении размерений и, следовательно, массы. В один момент удалось уменьшить мотоустановку в целом, быстро повысить КПД механической передачи, упростить все узлы привода и наряду с этим добиться горизонтального положения оси винта.
Помимо этого, сейчас (и лишь сейчас!) возможно сказать о четкой фиксации режима работы гребного винта, ставшего «четвертьпогружным». Раньше мельчайшее беспокойство на акватории приводило к работе движителя в столь неизвестных, мгновенно изменяющихся условиях, что его оптимизация становилась попросту тщетной; способом подбора получалось отыскать только варианты, более либо менее удовлетворяющие вынужденно заниженным требованиям.
Итак — новая предлагаемая вниманию судомоделистов схема скоростной модели выигрышнее если сравнивать с любыми известными вариантами. Остается испробовать ее в деле. Само собой разумеется, нужно будет посвятить отработке ее обводов определенное время.
Но, как говорится, игра стоит свеч. Резкий прирост динамических свойств и быстроходности — это еще не все плюсы новой схемы. Большое понижение трудоемкости как мотоустановки, так и самого микрокорпуса, разрешает вести широкий поиск в области гидродинамики глиссера.
А каковы возможности развития предложенной схемы? Оказывается, и с данной точки зрения она выигрышнее известных.
Посмотрите на чертежи. И попытайтесь врисовать в данную модель двухмоторную установку с противоположно вращающимися гребными винтами. Два двигателя находятся головками от оси корпуса, синхронизация гребных валов может осуществляться или несложной легкой шестеренчатой связью (которая рассчитывается только на упрочнения синхронизации, намного меньшие, чем упрочнения яркой передачи мощности одного двигателя!), или легким фрикционом.
Не считая успехи идеала по боковой устойчивости глиссера, подобное ответ весьма интересно и с позиций снятия большой мощности — при меньшей кубатуре глубина форсировки возможно увеличена. Да и неприятность шумоглушения при делении допустимого рабочего количества решается намного проще.
Еще один занятный фактор, с которым возможно встретиться при создании сверхмалой легкой модели, — необходимость обеспечения нужной аэродинамики.
В частности, это относится обводов корпуса, поскольку на глиссере нового типа нагрузка на единицу площади проекции корпуса «в плане» значительно меньше, а потенциальные возможности по быстроходности больше. Нельзя исключать, что в судомоделизме вопросы аэродинамики смогут выйти на первое стать и место перед задачами гидродинамики. И тогда вам окажут помощь графики, показывающие, какими параметрами пользоваться при подборе стабилизаторов и антикрыльев.
Как думается, подобные устройства, непривычные сейчас, станут нужными на моделях завтрашнего дня.
Наконец, хотелось бы предложить еще одно перспективное ответ; его возможно применять кроме того на простых радиоуправляемых сегодняшнего дня. Это — ввести в передачу по окончании маховика двигателя еще и муфту сцепления.
Суть мероприятия станет ясен, в случае если пристально разобраться с тем, что происходит с моделью и двигателем при прохождении и вводе поворота и из-за чего модели с электродвигателями по крайней мере не уступают глиссерам с моторами внутреннего сгорания.
Перед вводом в поворот мы так или иначе вынуждены скинуть скорость любой модели. На ДВС это осуществляется за счет управления карбюратором.
Но при всей отработанности схемы ей свойствен серьёзный недочёт: при понижении оборотов двигатель выходит из резонансного режима, заданного выхлопной трубой, и быстро сбрасывает мощность, некое время идяс маленьким замедлением из-за большой энергии, запасенной в высокооборотном маховике. Большой энергией владеет и тяжелая модель, что, не обращая внимания на потенциальную возможность двигателя быстро снизить мощность, заставляет затевать подготовку к повороту намного раньше.
Но вот сам поворот, вот он наконец пройден. А что сейчас? Необходимо было бы быстро прибавить скорость.
Но… не выйдет! Двигатель, выведенный из резонансного режима, имеет при любых действиях с карбюратором малую мощность, к тому же перед ним, не считая разгона тяжелой модели, ставится задача разогнать заторможенный маховик? Какая уж тут динамика…
И приходится спортсменам скрепя сердце переводить все параметры модели и мотоустановки с больших значений на промежуточные, не столь далекие от условий перемещения на повороте.
Пускай не так быстроходна, но чуть динамичнее. В противном случае так как не исключен вариант, в то время, когда разгон затянется так, что, не успев закончиться, обязан будет перейти в новое торможение перед очередным поворотом. Еще один компромисс…
Еще не надоело искать их?
А выход — в том же облегчении всей модели, повышении КПД мотоустановки в целом и… в применении муфты сцепления. Только она разрешит глиссеру с ДВС не только приблизиться по динамике к «электричкам», но, возможно, кроме того и превзойти их. Суть введения муфты вот в чем.
Перед поворотом муфта, до этих пор зафиксированная, мало отпускается (степень расфиксации легко поддается регулировке или возможно управляемой). Модель, в особенности легкая, скоро затормаживается, поскольку энергия раскрученного маховика уже не передается на винт полностью. Но сам маховик начинает усиливатьсяи энергию, поскольку мы сняличасть нагрузки с двигателя.
Мотор выходит на зарезонансные обороты. Так, по окончании прохождения поворота он уже подготовлен к выдаче большой мощности. Необходимо только… затормозить его включением муфты.
Через чур быстро это сделать не удастся — в маховике запасена огромная энергия, по окончании поворота конкретно идущая на разгон модели. А по окончании исчерпания избытков энергии перераскрученного маховика двигатель с высоких оборотов переходит на резонансные. Сразу же!
Зависимость скорости на дистанции для моделей разных типов:
1 — оптимизированная модель со сниженной удовлетворительными характеристиками и максимальной скоростью торможения-разгона, 2 — подобная модель, отрегулированная только по большой скорости и имеющая благодаря этого ухудшенные динамические характеристики, 3 — модель с электродвигателем подобных размерений и удельной мощности.Зависимость скорости на дистанции для моделей с ДВС:
1 — соответствует прошлому графику, 2 — модель уменьшена и облегчена, двигательная установка оптимизирована для новых условий, 3 — подобно 2-му, но в схеме использована муфта сцепления.Быть может, подобная система потребует или раздельного управления муфтой и карбюратором, или их совместной работы, при которой тяга карбюратора начинает двигаться по окончании полурасцепления муфты.
Тут опыт совершить несложно. Принципиально важно при выборе конструкции муфты обеспечить возможность ее плавного включения. Один из вероятных вариантов приведен на картинках. Он спроектирован на базе фирменных тормозов для авиамоделей, по их паспортным данным выстроен и график тормозного момента.
На картинках муфта представлена как отдельный узел, но имеется прямой суть объединить муфту с маховиком двигателя. В предложенном варианте муфта способна удержать только часть вращающего момента, поскольку для мотора 3,5 см3 момент доходит до 3000—4000 г*см. Требуемое трение достигается установкой нескольких дисков на поводке ведомой части вала и ответных элементов на шипах корпуса муфты.
Вероятны и другие варианты муфт (центробежные, типа тех, что стоят на радиоуправляемых автомоделях, либо хорошие фрикционные многодисковые) с механическим приводом от простых рульмашинок с введением в тягу пружинных элементов для управления тормозным моментом. Но электромуфта значительно привлекательнее, поскольку не требует применения рульмашинок, за счет чего достигается и упрощение схемы с соответствующим увеличением надежности, и облегчение модели.
Конечно же, в отличие от авиационного тормоза муфта обязана потреблять энергию только при расфиксации.
Тормозная ее характеристики и муфта:
1 — ведущий вал, 2 — токонесущие кольца для питания обмотки электромагнита, 3 — корпус муфты (мягкая сталь, стена по всей подробности не меньше 2 мм), 4 — обмотка магнита (провод ПЭЛ-0,3, до заполнения каркаса катушки; сопротивление обмотки около 6,5 Ом; по окончании проверки пропитать эпоксидной смолой), 5 — пружина, 6 — тормозная шайба (мягкая сталь толщиной 2 мм), 7 — ведомый элемент с пальцем-поводком, входящим в окно тормозной шайбы, 8 — шарикоподшипники.
Итак, рассмотрены увлекательные возможности развития радиоуправляемых скоростных глиссеров.
Возможно, не все конструкторские находки отыщут использование на моделях завтрашнего дня. Но при разработке новых аппаратов, перед тем как отвергнуть предложенные ответы, рекомендуем сначала еще раз пристально прочесть эту статью. И, основное, попытаться отвлечься от завораживающего влияния привычной супертехники, применяющей очень технологии и дефицитные материалы, основывающейся на «лобовых» приемах форсирования надежных разработок. А что если все значительно несложнее!
И последнее, поразмыслите и взвесьте еще раз — не следует ли заняться подобными микроглиссерами с упрощенными мотоустановками сейчас, дабы на следующий день с «бронекатерами», изготовленными из суперматериалов и снабженными замечательнейшими двигателями, не появляться сзади! Возможно, будущее за общедоступными в постройке микроглиссерами!
В.
ВИКТОРОВ, инженер-гидродинамик
Случайные записи:
Флайборд: Удивительные полеты на доске над водой: Экстремальный спорт
Похожие статьи, которые вам понравятся:
-
Казалось бы, что возможно лучше гребного винта! Он десятилетиями правильно помогает человеку, двигая различные суда, начиная от несложного прогулочного…
-
Спортсмены-судомоделисты, создающие миниатюрные радиоуправляемые гоночные катера, по праву вычисляют себя элитой в спортивной среде. Еще бы, поскольку…
-
20010,0,3500, Казалось ли вам когда-нибудь, что время просто тянется? Может быть вы работали в офисе, сидели за партой и слушали длительную лекцию, или…
-
Множество последних публикаций в «М-К» по вопросам конструирования гоночных кордовых аэромобилей и аэросаней помог нам в создании техники и более…
-