Гаджеты
-
 1-3 Декабря 2009 г состоится научно-практическая конференция, посвященная развитию отечественной наноиндустрии.
1-3 Декабря 2009 г состоится научно-практическая конференция, посвященная развитию отечественной наноиндустрии. 1–3 декабря 2009 г. в г...
-
 10 Безумных гаджетов для отправки сообщений
10 Безумных гаджетов для отправки сообщений Стилус-насадка для носа — гаджет для тех, кто постоянно мечтал иметь лишний палец на лице...
-
 10 Безумных периферийных устройств для компьютера
10 Безумных периферийных устройств для компьютера Titan Sphere — продукт скоро разорившейся компании SGRL, неудавшаяся попытка сообщить новое слово в сфере джойстиков...
-
 10 Безумных японских изобретений
10 Безумных японских изобретений Раструбы для глазных капель разрешают совершенно верно прицелиться в глаз, в то время, когда необходимо его чем-то зака...
-
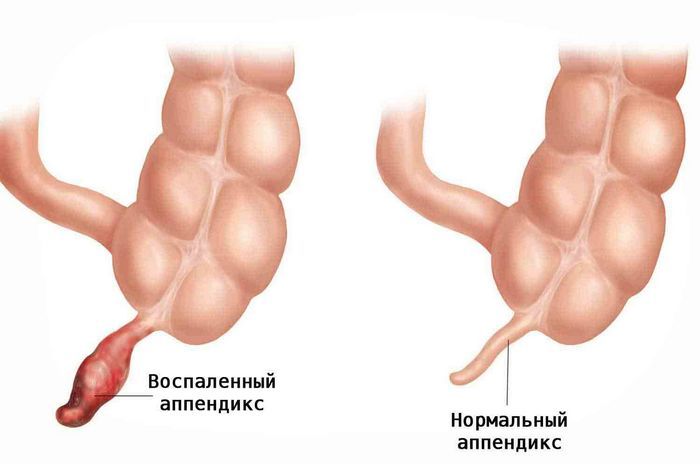 10 Бесполезных органов человека
10 Бесполезных органов человека Существуют ли в действительности ненужные органы? Вряд ли кому-то захочется расстаться со своим аппендиксом , пока он е...
-
 10 Важнейших стадий развития персональных компьютеров
10 Важнейших стадий развития персональных компьютеров «Мать всех демонов», 1968 год...
-
 10 Вариантов будущего через тысячу лет
10 Вариантов будущего через тысячу лет Будущее с инопланетянами — почему бы и нет? Кое-какие уверены, что инопланетяне уже среди нас...
Немного интересного:
-
 Я б в научные журналисты пошел, пусть меня научат
Я б в научные журналисты пошел, пусть меня научат Государственный университет Санкт-Петербурга с нового учебного года запускает новую магистерскую программу «Научно-попул...
-
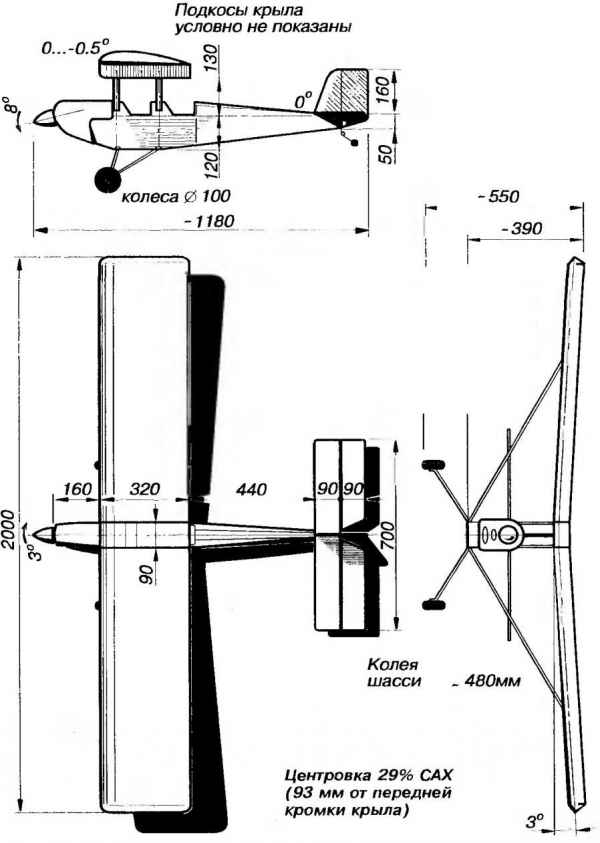 Гигант из италии
Гигант из италии Радиоуправляемая авиамодель, предлагаемая в данной публикации, очень необыкновенна для отечественной школы конструиров...
-
 Ученые измерили силу казимира с помощью микрорасчески
Ученые измерили силу казимира с помощью микрорасчески Группа исследователей из технологии и Гонконгского университета науки и Принстонского университета создали микросхему, в...
-
 Модель яхты класса «10»
Модель яхты класса «10» МОДЕЛЬ ЯХТЫ КЛАССА «10» пользуется громадной популярностью у моделистов-яхтсменов...
-
 «Ты» как «я»
«Ты» как «я» 20010,0,3500,
Местоимение «ты» помогает нам сделать выводы из своих поступков...
-
Создана система искусственного интеллекта, позволяющая автомобилям-роботам ориентироваться по карам
28.04.2017
 Hi-tech
Hi-tech -

В соответствии с имеющимся прогнозам к 2035 году на дорогах во всем мире будет пребывать около 21 миллиона машин-роботов. Для увеличения уровня безопасности перемещения эти машины должны будут обмениваться данными между собой и с облачными сервисами, на плечи которых ляжет управления и задача координации дорожным перемещением в целом. На данный момент уже ведутся разработки подобных систем и основной из неприятностей, с которой сталкиваются разработчики, есть то, что любой автомобиль в любой момент времени обязан знать собственный расположение и иметь привязку к карте с точностью не хуже 10 сантиметров.
Созданием совокупности коммуникации автомобиль-автомобиль и других сопутствующих разработок занимаются эксперты из Политехнического университета Нью-Йоркского университетапод руководством докторами наук И Фэнгом (Yi Fang) и Эдуардом К. Вонгом (Edward K. Wong). Разрабатываемые совокупности имеют большой уровень интеграции с облачным сервисом HERE HD Live Map, что, приобретая эти от бортовых датчиков, другого оборудования и камер автомобиля, рассчитывает оптимальный режим перемещения, учитывая все быстроизменяющиеся условия окружающей среды.
")
направляться подчернуть, что сервис HERE HD Live Map есть совместным «детищем» компаний Audi, BMW, Daimler и Intel, а в 2017 году к проекту собираются подключиться китайские компании Tencent, NavInfo, и компания GIC из Сингапура.
Отличные навигационные карты, применяемые в совокупности HERE HD Live Map, должны сами имеет точность на уровне 10–20 сантиметров. А транспортные средства, применяющие эти карты, должны обновлять собственный расположение на них в реальном времени с точностью, соответствующей точности карты. Но, это само по себе есть сверхсложной задачей, поскольку камеры и существующие датчики, применяемые совокупностями управления машин, не в состоянии обеспечить нужную для этого точность.
Кроме информации о текущем расположении, совокупности машин должны передавать в «облако» информацию об дорожных условиях, погоде, найденных препятствиях, об трансформации режимов ограничения скорости и других параметрах, из которых складывается картина обстановки на дороге.
Классическая «прямая» обработка всего этого огромного потока поступающих данных требует соответствующих огромных вычислительных мощностей, мощностей, которыми не владеют еще кроме того самые высокопроизводительные современные суперкомпьютеры. Исходя из этого исследователи применяли в собственной совокупности новые разработки трехмерного компьютерного видения и глубинные нейронные сети, каковые возможно научить для стремительного ответа самых непростых задач, среди них и составлению «живых» карт для машин-роботов.
Применение упомянутых выше разработок разрешает совокупности автомобиля ориентироваться на местности, учитывая сходу множество факторов, применяя для этого кроме того не весьма четкие изображения, приобретаемые камерами автомобиля на ходу. Получающаяся точность определения положения соответствует а также превосходит точность применяемой совокупностью карты, что повышает уровень качества работы «облачного» сервиса и усиливает уровень безопасности перемещения во большое количество раз.
.dti-h1 { width: 690px; height: 90px; }@media(min-width: 500px) { .dti-h1 { width: 690px; height: 90px; } }@media(min-width: 800px) { .dti-h1 { width: 690px; height: 90px; } }
Случайные записи:
- Созданию биороботов с живыми мышцами научат всех желающих
- В россии вступил в силу закон о государственной тайне
[РВ] Топография, часть 2. Измерение расстояний по карте
Похожие статьи, которые вам понравятся:
-
Создана первая система искусственного интеллекта на базе спинтронных элементов
Применяемые на данный момент совокупности ИИ (ИИ) функционируют на базе вычислительных совокупностей, в базе которых лежат совсем классические…
-
Современные роботы являются уже достаточно идеальными автомобилями, многие из которых имеют возможность самостоятельно принимать решения и делать разные…
-
Google и ford работают над автомобилями, управляемыми жестами
В недалеком будущем водители смогут открывать окна и настраивать климат-контроль одним взмахом руки. Интернет-гигант Гугл и американский производитель…
-
Компании apple не нужен автомобиль icar, чтобы устанавливать правила на дорогах
Не секрет, что покойный председатель совета директоров компании Apple Стив Джобс страстно увлекался идеей доведения разработок компании до мира…