Гаджеты
-
 1-3 Декабря 2009 г состоится научно-практическая конференция, посвященная развитию отечественной наноиндустрии.
1-3 Декабря 2009 г состоится научно-практическая конференция, посвященная развитию отечественной наноиндустрии. 1–3 декабря 2009 г. в г...
-
 10 Безумных гаджетов для отправки сообщений
10 Безумных гаджетов для отправки сообщений Стилус-насадка для носа — гаджет для тех, кто постоянно мечтал иметь лишний палец на лице...
-
 10 Безумных периферийных устройств для компьютера
10 Безумных периферийных устройств для компьютера Titan Sphere — продукт скоро разорившейся компании SGRL, неудавшаяся попытка сообщить новое слово в сфере джойстиков...
-
 10 Безумных японских изобретений
10 Безумных японских изобретений Раструбы для глазных капель разрешают совершенно верно прицелиться в глаз, в то время, когда необходимо его чем-то зака...
-
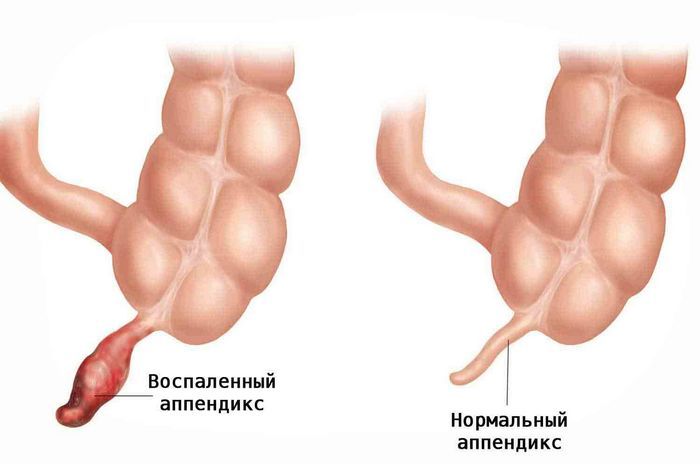 10 Бесполезных органов человека
10 Бесполезных органов человека Существуют ли в действительности ненужные органы? Вряд ли кому-то захочется расстаться со своим аппендиксом , пока он е...
-
 10 Важнейших стадий развития персональных компьютеров
10 Важнейших стадий развития персональных компьютеров «Мать всех демонов», 1968 год...
-
 10 Вариантов будущего через тысячу лет
10 Вариантов будущего через тысячу лет Будущее с инопланетянами — почему бы и нет? Кое-какие уверены, что инопланетяне уже среди нас...
Немного интересного:
-
 Летучая и надежная
Летучая и надежная В то время, когда «неорганизованному» авиамоделисту-кордовику приходится выбирать конструкцию тренировочной модели, то ...
-
 Таймерная модель вертолета
Таймерная модель вертолета В авиамодельных кружках Дома пионеров Коминтерновского района, на облСЮТ и в харьковской школе№ 112 в течение нескольк...
-
 Ученые придумали умный пластырь
Ученые придумали умный пластырь Как сообщается в научных источниках, людям удалось придумать так называемый умный лейкопластырь, что способен поменять ц...
-
 2012 Toyota plug-in prius hybrid: калифорнийцы смогут сэкономить $4000
2012 Toyota plug-in prius hybrid: калифорнийцы смогут сэкономить $4000
Модель 2012 года небезизвестного гибрида Toyota Prius уже вот-вот поступит в продажу в американских дилерских центрах...
-
 Астероиды помогли возникнуть жизни на земле
Астероиды помогли возникнуть жизни на земле Благодаря парниковому эффекту, появившемуся из-за интенсивной астероидной бомбардировки, вода на старой Почва оставалась...
-
Радиоуправляемая модель вертолета
07.09.2016
 В мире моделей
В мире моделей -
В последнее, время в авиационном моделизме широкое распространение взяли летающие модели, управляемые по радио, а также вертолеты. В первый раз такую модель показал во второй половине 50-ых годов двадцатого века на Всесоюзных соревнованиях С. Воробьев. Для управления полетом он применил принцип трансформации центровки аппарата.
Спустя год на первенстве страны в Куйбышеве показался вертолет В. Борисова с аэродинамическим приводом ротора. В первой половине 60-ых годов двадцатого века на матчевой встрече Ленинграда и спортсменов Москвы он же представил выстроенную по схеме Б. Юрьева новую модель с рулевым винтом. Но машина была «сырой» и, к сожалению, так и осталась незаконченной.
В течение последовательности автор и лёт статьи В. Слепков трудился над созданием радиоуправляемой модели вертолета. Во второй половине 70-ых годов XX века она была выстроена и совершила последовательность успешных полетов длительностью в пара мин., не обращая внимания на относительно малую мощность двигателя.
Узнаваемые зарубежные модели вертолетов, в большинстве случаев, тяжелы, потому, что имеют сложную совокупность управления — из этого потребность в замечательном (до 10 см3) двигателе. Преимущество же модели Слепкова в ее простоте.
Она может делать управляемые развороты, не обращая внимания на ограниченное число команд, и имеет двигатель 2,5 см3.
")
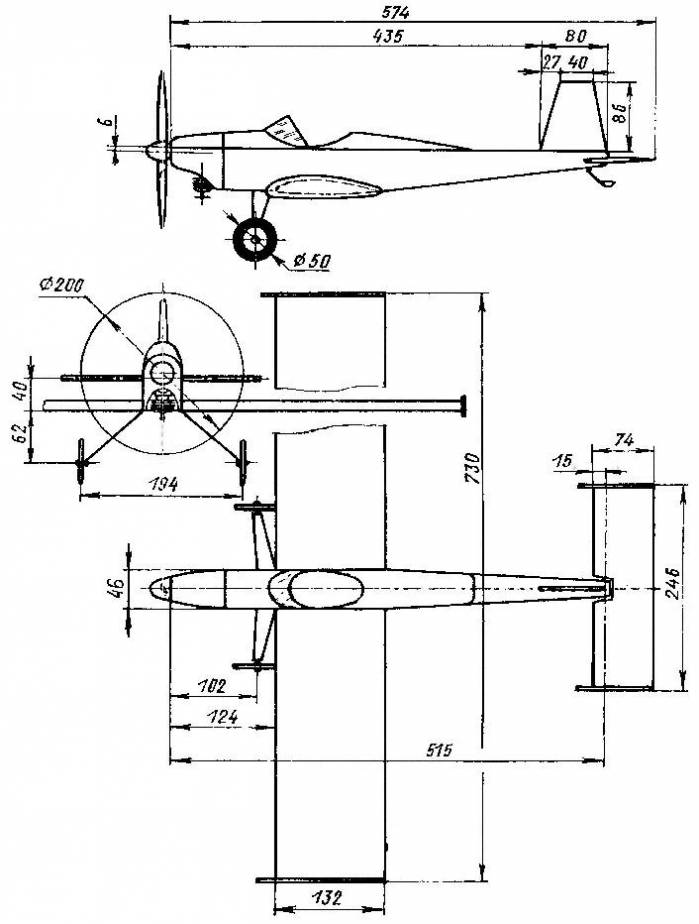
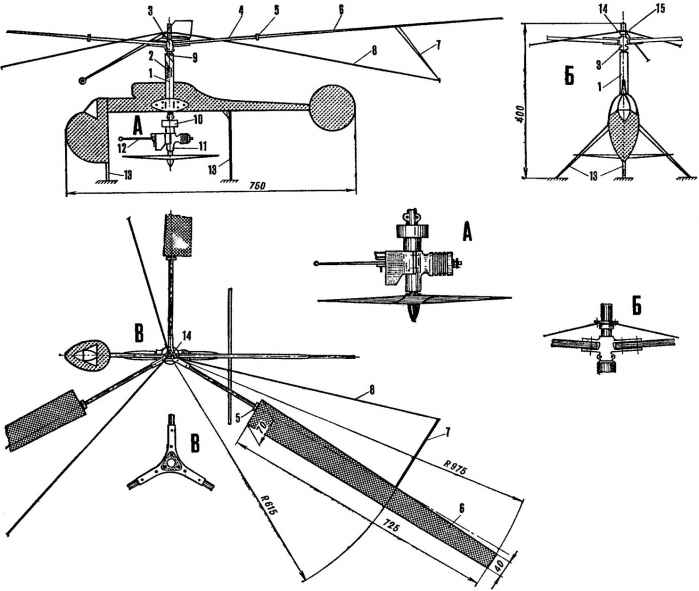
Рис. 1. Схема модели вертолета.
Рис. 2. Лопасть винта:
1 — стабилизирующие грузы, 2 — рычаг, 3 — лопасть, 4 — стабилизаторы, 5 — втулка.
Модель дешева широкому кругу авиамоделистов.
РАСЧЕТ ТЯГИ ВИНТА. Постройку любой модели начинают с выбора главных определения и параметров мощности двигателя. После этого возможно перейти к определению тяги винта. По формуле Н. Е. Жуковского для режима висения она вычисляется следующим образом:
Т = (33,25 • N • D • ?0)2/3,
где N — мощность двигателя в л. с.;
D — диаметр винта в метрах; ?0 — относительный КПД несущего винта.
За вычетом утрат (40 процентов) на вращение рулевого винта, вентилятора и фактически редуктора мощность двигателя для работы несущего винта образовывает 0,15 л. с.
Значение довольно КПД последнего может быть около 0,7—0,75, а с учетом ухудшения аэродинамики винта из-за стабилизирующих стабилизаторов и грузов — 0,6.
Подставляя эти параметры в формулу, определяем тягу:
Т = (33,25 • 0,15 • 1,94 • 0,6)2/3 = 3,3 кг.
Но при горизонтальном полете она может возрасти от понижения индуктивного сопротивления. Это подтверждают летные опробования. При двигателе, отрегулированном на большую мощность, скороподъемность модели достигает 1—1,5 м/с. При дросселировании двигателя модель совершает горизонтальный полет.
НЕСУЩИЙ ВИНТ модели складывается из трех лопастей.
Любая из них (рис. 2) может поворачиваться во втулке относительно оси, проходящей через линию фокусов, другими словами имеет осевом шарнир. Установка угла ее атаки в полете происходит машинально посредством стабилизирующего груза, что тягой (капроновая леска O 0,5 мм) связан с валом. При малом вращении ротора стабилизирующий груз опускается и сокращает тем самым установочный угол лопасти, сглаживая роторную скорость.
При отклонении плоскости ротора они циклически изменяют установочные углы лопастей и возвращают ротор в прошлое положение. Для демпфирования колебаний довольно осевого шарнира на ней установлены стабилизаторы, каковые, помимо этого, улучшают переход модели на режим авторотации.
(function(w, d, n, s, t) { w[n] = w[n] || []; w[n].push(function() { Ya.Direct.insertInto(144860, yandex_ad2, { ad_format: direct, font_size: 0.9, type: horizontal, border_type: ad, limit: 2, title_font_size: 2, links_underline: false, site_bg_color: FFFFFF, header_bg_color: 000000, border_color: CCCCCC, title_color: FF0000, url_color: 000000, text_color: 000000, hover_color: CC0000, no_sitelinks: true }); }); t = d.getElementsByTagName(script)[0]; s = d.createElement(script); s.src = //an.yandex.ru/system/context.js; s.type = text/javascript; s.async = true; t.parentNode.insertBefore(s, t); })(window, document, yandex_context_callbacks);
Профиль лопасти выпукло-вогнутый, переменный — его вогнутость и толщина уменьшаются к концу.В самоё широком месте (сечение А — А) относительная толщина образовывает 12 процентов, вогнутость — 6 процентов. На финише эти величины соответственно 8 процентов и 4 процентов (сечение Б — Б).
Лопасть изготовлена из бальзы, задняя кромки и передняя — из сосны. Ось металлическая O 5 мм, вклеена на смоле и зафиксирована металлическим штифтом O 2 мм. Вращается она во втулке на двух шарикоподшипниках типа 1000065 (наружный O 13 мм). Лопасти смогут поворачиваться в пределах — 5° — + 40°.
Профиль стабилизатора плоско-выпуклый, с относительной толщиной 8 процентов (сечение В — В), сделан полностью из бальзы удельного веса 0,1 г/см3. Как и лопасть, он оклеен микалентной бумагой, окрашен нитрокраской и покрыт сверху полимеризующимся лаком. Для горизонтального полета на модели установлен автомат перекоса (рис. 3), циклически изменяющий угол установки лопасти по отношению к фюзеляжу.
Рис. 3. Автомат перекоса:
1 — шарикоподшипник, 2 — рычаг, 3 — управляющая тяга, 4 — тяга к стабилизирующему грузу, 5 — вал несущего впита, 6 — стойка, 7 — кожух редуктора, 8 — место установки прокладок для регулировки плоскости автомата перекоса (в пределах 0—10°), Д — диапазон трансформации углов установки тяг, идущих к стабилизирующим грузикам на протяжении полета.
Рис. 4. Кинематическая схема редуктора:
1 — двигатель, 2 — маховик-вентилятор, 3 — муфта свободного хода, 4 — вал несущего винта, 5 — направляющие ролики, 6 — ведомый шкив, 7 — ведущий шкив.
Рис. 5. Компоновочная схема фюзеляжа:
1 — центральная часть, 2 — отсек для радиоаппаратуры, 3 — кожух редуктора, 4 — рулевая машинка, 5 — хвостовая балка, 6 — управляющая тяга, 7 — киль, 8 — рулевой винт, 9 — костыль, 10 — задняя стоика шасси, 11 — передняя стойка шасси.
На разглядываемой модели данный угол — фиксированный, отрегулированный на постоянную горизонтальную скорость полета V = 5 м/с.
Конструкция автомата перекоса базируется на шарикоподшипнике тина 1000903 с внутренним O 17 мм и наружным 30 мм. Внешнее кольцо подшипника прикреплено к фюзеляжу на трех дюралюминиевых стойках, установленных под углом 10° к плоскости вращения ротора по курсу полета.
Вместе с ротором вращается и внутреннее кольцо с тремя рычагами, соединенными тягами со стабилизирующими грузами, каковые циклически меняют ход лопастей.
РУЛЕВОЙ ВИНТ имеет две лопасти (рис. 1), прямоугольные в плане, шириной 38 мм. Профиль выпукло-вогнутый, толщина в комлевой части 12 процентов, на финише 8 процентов.
Вертолет управляется по курсу трансформацией шага винта. Среднее значение угла установки лопастей 15°, диапазон трансформации угла их поворота — 2° + 12°.
РЕДУКТОР и ДВИГАТЕЛЬ. Двигатель модели с рубахой охлаждения O 40 мм крепится в нижней части фюзеляжа посредством подробности, выпиленной из дюралюминия. На его валу установлены первая шестерня редуктора (рис. 4) и вентилятор.
Редуктор несущего винта — трехступенчатый. Первая ступень выполнена на шестернях с модулем 0,5 мм шириной 6 мм: ведущая — металлическая, с числом зубцов Z1 = 37, ведомая — латунная с числом зубцов Z2 = 48. Вторая ступень имеет шестерни с модулем 0,6 мм: ведущая — металлическая, ведомая — дюралюминиевая, с числом зубцов соответственно Z3 = 23 и Z4 = 177. Третья ступень — на шестернях из того же материала, что и вторая.
Модуль увеличен до 0,8 мм, число зубцов Z5 = 20, Z6 = 100.
Так, неспециализированное передаточное отношение друг к другу валов двигателя и несущего винта составит:
і = Z1/Z2 · Z3/Z4 · Z5/Z6 ? 1/32 .
Вращение от главного редуктора к рулевому винту передается через кольцевую капроновую нить и два шкива, выточенных из дюралюминия. Ведущий установлен на второй ступени редуктора, ведомый — на рулевом винте.
Их диаметры однообразны. Потому, что последняя ступень редуктора имеет передаточное отношение 1:5, то не учитывая проскальзывания рулевой винт вращается в пять раз стремительнее несущего.
На второй ступени главного редуктора установлена муфта свободного хода, снабжающая спуск вертолета при остановке двигателя.
Авторотация не нарушает связи между несущим и рулевым винтами, что разрешает руководить курсом модели при понижении.
За время опробований как на земле, так и в полете двигатель с редуктором проработал около трех часов. Наряду с этим потребовалось заменить шариковые подшипники и поршень вала двигателя.
Износ шестерен редуктора не превысил допустимой величины.
ФЮЗЕЛЯЖ складывается из двух разъемных элементов: центральной части и хвостовой балки (рис. 5), каковые соединены резиновыми нитями. Такое крепление надежно фиксирует положение хвостовой балки в полете и смягчает нагрузки при ударах на посадке.
Конструкция набирается из сосновых стрингеров сечением 3X3 мм2 в хвостовой балке и 5X5 мм2 в центре, в которой установлены кроме этого 7 шпангоутов из фанеры толщиной 1 мм, усиленных сосновыми рейками сечением 3,5 X 3,5 мм2. Место крепления двигателя снизу усилено фанерой толщиной 5 мм. Редуктор собственной верхней частью винтами М4X10 мм крепится к боковым брускам сечением 10X6 мм.
Его кожух склеен из бальзы толщиной 2 мм.
Все узлы фюзеляжа соединены эпоксидной смолой, что снабжает надёжную защиту и достаточную прочность от действия горючего.
Для дешифратора и размещения приёмника впереди фюзеляжа сделан особый отсек.
Передние стойки шасси выгнуты из дюралюминиевых пластин толшиной 2,5 мм, задняя — из двух металлических прополочных стержней O 2,6 мм. Центральная часть фюзеляжа обтянута капроном, хвостовая балка — микалентной бумагой.
ЗАПУСК. Модель стартует с рук. Двигатель приводится в воздействие простым методом, за маховик-вентилятор.
Уменьшить запуск возможно стартером.
Первый полет нужно проводить в штилевую погоду при нейтральном положении кольца автомата перекоса. Время работы двигателя нужно сократить таймером. При верном старте вертолет набирает высоту по вертикали со скоростью около 1,5 м/с.
По окончании завершения работы двигателя модель переходит на авторотацию.
Для предотвращения вращения фюзеляжа рукоятку управления рулевым винтом на пульте управления отклоняют вправо.
Предстоящие полеты возможно делать с отклоненным кольцом автомата перекоса, благодаря чему вертолет может выполнять взлет с горизонтальной скоростью и управляться по курсу.
ГЛАВНЫЕ ПАРАМЕТРЫ МОДЕЛИ
Диаметр несущего винта, мм — 1940
Ометеемая поверхность, дм2— 294
Вес модели, г — 2950Коэффициент заполнения несущего винта — 0,065
Диаметр рулевого винта, мм — 480
Полетная мощность двигателя, л. с. — 0,25Скорость вращения вала двигателя в полете, об/мин — 12 000
Передаточное отношение редуктора от двигателя к несущему винту — 1:32
Передаточное отношение от двигателя к рулевому винту — 1:6,4
Скорость вращения несущего винта, об/мин — 375Скорость вращения рулевого винта, об/мин — 1875
Вес аппаратуры, установленной на модели, г — 515В. СЛЕПКОВ, кандидат технических наук, мастер спорта СССР
Случайные записи:
Как выбрать свою первую модель вертолета — советы RCMOTORS.RU
Похожие статьи, которые вам понравятся:
-
В авиамодельных кружках Дома пионеров Коминтерновского района, на облСЮТ и в харьковской школе № 112 в течение нескольких лет ведутся работы над соосными…
-
И все-таки их строят — эти «безумные» стрекозы, смотрящиеся непривычно кроме того на фоне экспериментальных моделей-бесхвосток! Их строят не обращая…
-
Многократные попытки переделок свободнолетающих моделей вертолетов на радиоуправляемые, как это было с моделями планёров и самолётов, были бесплодными….
-
Радиоуправляемая модель биплана
Желание выстроить модель биплана под имеющийся двигатель МДС-6,5 КУ сначала стало причиной поиску аналогов. Просмотр каталогов и журналов помог решить,…
-