Гаджеты
-
 1-3 Декабря 2009 г состоится научно-практическая конференция, посвященная развитию отечественной наноиндустрии.
1-3 Декабря 2009 г состоится научно-практическая конференция, посвященная развитию отечественной наноиндустрии. 1–3 декабря 2009 г. в г...
-
 10 Безумных гаджетов для отправки сообщений
10 Безумных гаджетов для отправки сообщений Стилус-насадка для носа — гаджет для тех, кто постоянно мечтал иметь лишний палец на лице...
-
 10 Безумных периферийных устройств для компьютера
10 Безумных периферийных устройств для компьютера Titan Sphere — продукт скоро разорившейся компании SGRL, неудавшаяся попытка сообщить новое слово в сфере джойстиков...
-
 10 Безумных японских изобретений
10 Безумных японских изобретений Раструбы для глазных капель разрешают совершенно верно прицелиться в глаз, в то время, когда необходимо его чем-то зака...
-
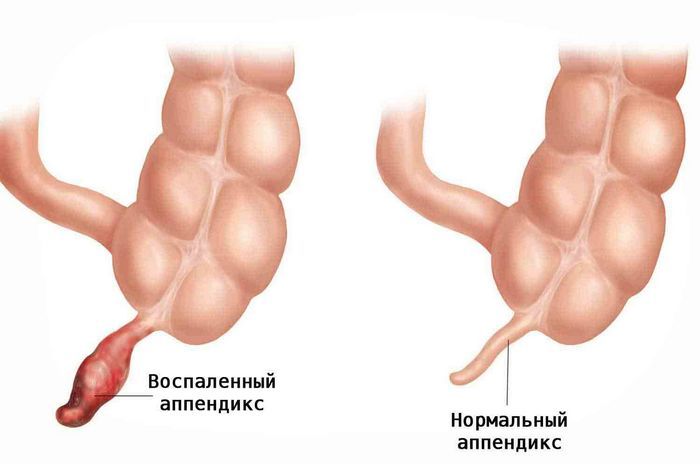 10 Бесполезных органов человека
10 Бесполезных органов человека Существуют ли в действительности ненужные органы? Вряд ли кому-то захочется расстаться со своим аппендиксом , пока он е...
-
 10 Важнейших стадий развития персональных компьютеров
10 Важнейших стадий развития персональных компьютеров «Мать всех демонов», 1968 год...
-
 10 Вариантов будущего через тысячу лет
10 Вариантов будущего через тысячу лет Будущее с инопланетянами — почему бы и нет? Кое-какие уверены, что инопланетяне уже среди нас...
Немного интересного:
-
 Зачем кавалеры чёрных вдов разрушают паутину самок
Зачем кавалеры чёрных вдов разрушают паутину самок Самец тёмной вдовы разрушает сети собственной избранницы, дабы на её запах не пришли женихи-соперники...
-
 Daimler, ford и nissan объединяют усилия для создания коммерческих водородных элементов
Daimler, ford и nissan объединяют усилия для создания коммерческих водородных элементов
Daimler AG, Ford Motor Company и Nissan Motor Co, ЛТД подписали трехстороннее соглашение о совместной разработке неспец...
-
 Ученые создали нановолокна, превосходящие по прочности все композитные материалы
Ученые создали нановолокна, превосходящие по прочности все композитные материалы Созданы сверхпрочные и сверхупругие нановолокна, талантливые заменить все существующие композитные материалы, применяемы...
-
 Британские ученые доказали бессмысленность солености чипсов
Британские ученые доказали бессмысленность солености чипсов Великобританские ученые постоянно удивляютцелый цивилизованный мир собственными, мягко говоря, необыкновенными изучениям...
-
 Плодовые мушки могут многое рассказать о человеческих болезнях
Плодовые мушки могут многое рассказать о человеческих болезнях Думается, что у обычной человека и плодовой мушки не может быть ничего общего, но наружность обманчива...
-
Моделисту о вертолете
12.10.2011
 В мире моделей
В мире моделей -

Многократные попытки переделок свободнолетающих моделей вертолетов на радиоуправляемые, как это было с моделями планёров и самолётов, были бесплодными. Это разъясняется тем, что модели вертолетов свободного полета, выстроенные по несимметричной либо соосной схемам с вращающимися двигателями, не имеют того, что именуется корпусом. Попросту говоря, у них нет ни носа, ни хвоста.
Исходя из этого всякое перемещение для них, не считая «вверх» и «вниз», имеет направление вперед. А управление направлением перемещения модели вертолета без ориентированного в пространстве корпуса, как и управление скоростью перемещения, нереально без автомата перекоса. Его же на свободно-летающих и так называемых таймерных вертолетах и нет.
Уточним, что радиоуправляемой именуется такая модель вертолета, которая может приземлиться на место взлета. Современная модель для того чтобы типа имеет практически те же органы управления, что и громадный вертолет (не смотря на то, что на отдельных моделях, как и на обрисовываемой, нет привода на неспециализированный ход).
Практически все модели оснащены гироскопическими автоматами стабилизации (конкретно связанными с несущим ротором), назначение которых — обеспечить постоянное положение плоскости вращения несущего ротора при резких внешних возмущениях.
Приводим чертежи и краткое описание одной из японских моделей ТМ-20. Не все технические задачи решены в ней наилучшим образом.
Конструктору, желающему заняться освоением данной неизученной области технического творчества, направляться готовиться к преодолению серьёзных трудностей.
В отечественной литературе описаний радиоуправляемых рекомендаций и моделей вертолётов по их постройке до тех пор пока нет. Дело это для отечественных моделистов новое, а быть пионером в новом направлении модельной техники почетно.
Радиоуправляемые модели вертолетов — новый класс в авиамодельном спорте.
В правилах соревнований до тех пор пока нет кроме того определения, что такое модель вертолета, не созданы и четкие технические требования.
Недочёт информации о таких моделях сдерживает развитие этого класса. Как следствие, к сожалению, приходится констатировать громадное отставание в нем отечественных спортсменов.
Рис. 1.
")
Рис. 2.
Рис. 3.
Было много попыток поднять в атмосферу радиоуправляемую модель вертолета, но преодолеть психотерапевтический барьер — боязнь разбить столь сложную технику — удалось лишь авиамоделистам Столичного авиационного университета Виталию Игорю и Макееву Цибизову, каковые установили первый Всесоюзный рекорд длительности полета с посадкой на место взлета, равный 6 мин 20 с. В другом полете их модель пролетела 2700 м и приземлилась на заблаговременно намеченную площадку.
Освоение ими пилотирования модели обошлось без важных поломок. Исходя из этого возможность безаварийного освоения новой техники нужно считать доказанной. Высказывается кроме того вывод, что обучиться пилотировать модель вертолета сходу несложнее, чем переучиваться по окончании пилотирования модели самолета. Но перед тем как приступать к постройке модели, нужно познакомиться с изюминками схемы, конструкции и принципом попета вертолета.
Начнем с терминологии, которая в будущем облегчит отечественное согласие.
Вертолет — летательный аппарат тяжелее воздуха, талантливый без движений висеть, и перемещаться в воздухе под любым углом к горизонту. Подъемная сила и тяга у него создаются одним либо несколькими роторами, приводимыми во вращение мотором.
Однороторный вертолет (рис. 1) с одним (главным) несущим хвостовым винтом и ротором для компенсации реактивного момента. Хвостовой винт употребляется кроме этого для управления по курсу.
Соосный вертолет (К-26, рис. 2) с двумя роторами, расположенными на одной оси и вращающимися в противоположных направлениях.
Вертолет поперечной схемы (рис.
3) с двумя роторами, расположенными по сторонам фюзеляжа и вращающимися в противоположных направлениях.
Вертолет продольной схемы (рис. 4) с двумя роторами, расположенными по финишам фюзеляжа и вращающимися в противоположных направлениях.
Рис. 5. Автомат-перекос:
1 — вал ротора, 2 — тяга, 3 — оси автомата-перекоса, 4 — автомат-перекос, 5 — тяга поперечного управления, 6 — тяга продольного управления, 7 — рычаг управлення неспециализированным шагом.
Рис.
6. Схема однороторного вертолета:
1 — тяга, 2 — вертикально поставленные тяги, 3 — горизонтально поставленные тяги, 4 — вес, 5 — лобовое сопротивление.
Ротор (основной) — винт, служащий для подъемной силы.
Автомат-перекос (рис.
5) — механизм, служащий для циклического трансформации угла установки (шага) лопастей ротора.
Втулка ротора — агрегат, служащий для соединения лопастей с ведущим валом.
Горизонтальный шарнир — часть втулки ротора, снабжающая возможность махового перемещения лопастей.
Осевой шарнир — часть втулки ротора, разрешающая изменять угол установки (шага) лопастей.
Конус ротора — поверхность, обрисовываемая лопастями ротора.
Плоскость вращения ротора — плоскость, проходящая через втулку ротора перпендикулярно ее оси.
Угол взмаха — угол между осью плоскостью вращения и лопастями ротора.
Угол установки — угол между хордой профиля попасти и плоскостью вращения ротора.
Изменение неспециализированного шага — одновременное, однообразное изменение углов установки всех лопастей всех роторов вертолета.
Висение — неподвижное положение вертолета в воздухе, в то время, когда его вертикальная и горизонтальная скорости относительно окружающего воздуха равны нулю.
Авторотация — режим работы ротора без подачи мощности от мотора. Ротор на режиме авторотации вращается под действием набегающего (снизу либо сбоку) потока воздуха, создавая подъемную силу и тягу. Термин используется к вертолету в цепом.
В авиамоделизме громаднейшее распространение по конструктивным соображениям взяли однороторные модели вертолетов.
О работе ротора необходимо знать следующее.
Чем меньше число лопастей, тем больше его эффективность.
При висении и при вертикальном подъеме ротор вертолета трудится подобно пропеллеру. При поступательном полете его ось вращения наклоняется вперед, и он трудится на режиме новой обдувки. В то время, когда лопасти вращаются, подъемная сила заставляет их подниматься, тогда как центробежная сила мешает их чрезмерному закидыванию вверх, исходя из этого диск ротора получает коническую форму.
От формы лопасти теоретически зависят аэродинамические характеристики вертолета.
Но практика четных опробований не распознала этого влияния так, дабы возможно было сделать какие-либо определенные выводы. Но улучшение поверхности лопасти дает большое понижение нужной для попета мощности двигателя. Отрицательная закрутка попасти на 8—10° дает повышение тяги на 3—4 процентов.
Скорость перемещения лопасти относительно воздуха неодинакова.
Она меньше у оси вращения и больше у финиша и, помимо этого, изменяется в зависимости от положения попасти по отношению к направлению полета.
Так, при вращении винта скорость попасти, движущейся вперед, слагается из скоростей ее поступательного движения и вращения вертолета. Для лопасти же, движущейся назад, скорость будет определяться разностью между скоростью поступательного перемещения всей автомобили и собственной скоростью вращения.
Из-за меньшей скорости у попасти, движущейся назад, будет меньше и подъемная сила либо, вернее, была бы меньше, если бы в этом случае не возрастал ее угол атаки для сохранения равновесия. Но через чур увеличивать данный угол также запрещено.
Предел большой скорости полета определяется величиной подлинного угла атаки отстающей попасти.
Повышение числа оборотов ротора при соответственном уменьшении его диаметра ведет к ухудшению чёрта висения. Значительных улучшений возможно достигнуть, применив профили с громадным значением критических углов атаки, в случае если это не приведет к большому возрастанию сопротивления.
Рис. 7. График нужной мощности для горизонтального полета.
Рис. 8. Диаграмма надёжных высот для случая авторотирующей посадки.
Близость почвы и так называемая «земная подушка» существенно воздействуют на аэродинамические чертей ротора. Но на расстоянии, равном диаметру ротора, этим влиянием уже возможно пренебречь. Для висения вертолета без поступательной скорости нужна мощность на 30 процентов громадная, чем при горизонтальном полете на оптимальной скорости.
Такое же явление отмечается при комплекте высоты. Динамический потолок (с поступательной скоростью) неизменно больше статического (на режиме висения). При остановке мотора вертолет делается автожиром. В этом случае ротор вращается без подвода мощности в следствии действия аэродинамических сил. Последние снабжают нужную тягу ротора и поддерживают его вращение.
Но это превращение зависит от многих факторов. Основной из них — направление обдувки ротора воздушным потоком.
При моторном полете воздушный поток набегает на ротор вертолета сверху, на режиме авторотации — снизу.
Для обеспечения авторотации нужна определенная скорость потока (прямого либо косого), другими словами вертолет обязан перемещаться довольно него. Так, для надёжной авторотирующей посадки с режима висения аппарат должен иметь запас высоты не меньше 150 м либо при горизонтальном полете, поступательную скорость не меньше 120 км/ч, в другом случае авария неизбежна.
Таковы краткие сведения о вертолете, каковые нужно знать авиамоделисту.
Случайные записи:
Советы моделисту. Подставка для саиолетов и. Вертолетов
Похожие статьи, которые вам понравятся:
-
Радиоуправляемая модель вертолета
В последнее, время в авиационном моделизме широкое распространение взяли летающие модели, управляемые по радио, а также вертолеты. В первый раз такую…
-
В авиамодельных кружках Дома пионеров Коминтерновского района, на облСЮТ и в харьковской школе № 112 в течение нескольких лет ведутся работы над соосными…
-
И все-таки их строят — эти «безумные» стрекозы, смотрящиеся непривычно кроме того на фоне экспериментальных моделей-бесхвосток! Их строят не обращая…
-
Модель, которую мы предлагаем вам сделать, выполнена по редко видящейся схеме — два ее несущих ротора при вращении пересекаются. Выстроить ее не весьма…
-