Гаджеты
-
 1-3 Декабря 2009 г состоится научно-практическая конференция, посвященная развитию отечественной наноиндустрии.
1-3 Декабря 2009 г состоится научно-практическая конференция, посвященная развитию отечественной наноиндустрии. 1–3 декабря 2009 г. в г...
-
 10 Безумных гаджетов для отправки сообщений
10 Безумных гаджетов для отправки сообщений Стилус-насадка для носа — гаджет для тех, кто постоянно мечтал иметь лишний палец на лице...
-
 10 Безумных периферийных устройств для компьютера
10 Безумных периферийных устройств для компьютера Titan Sphere — продукт скоро разорившейся компании SGRL, неудавшаяся попытка сообщить новое слово в сфере джойстиков...
-
 10 Безумных японских изобретений
10 Безумных японских изобретений Раструбы для глазных капель разрешают совершенно верно прицелиться в глаз, в то время, когда необходимо его чем-то зака...
-
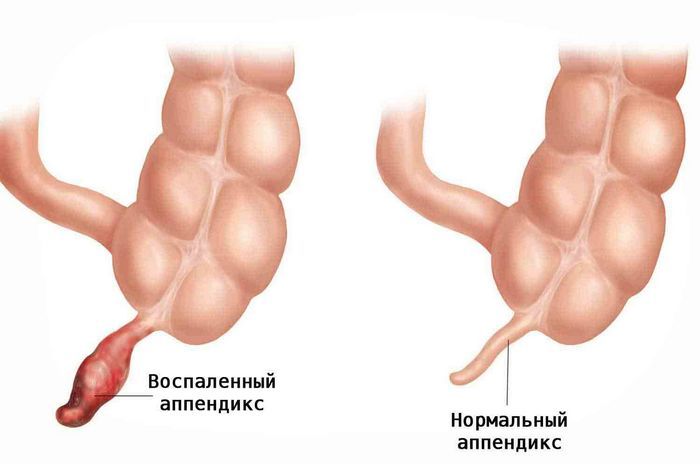 10 Бесполезных органов человека
10 Бесполезных органов человека Существуют ли в действительности ненужные органы? Вряд ли кому-то захочется расстаться со своим аппендиксом , пока он е...
-
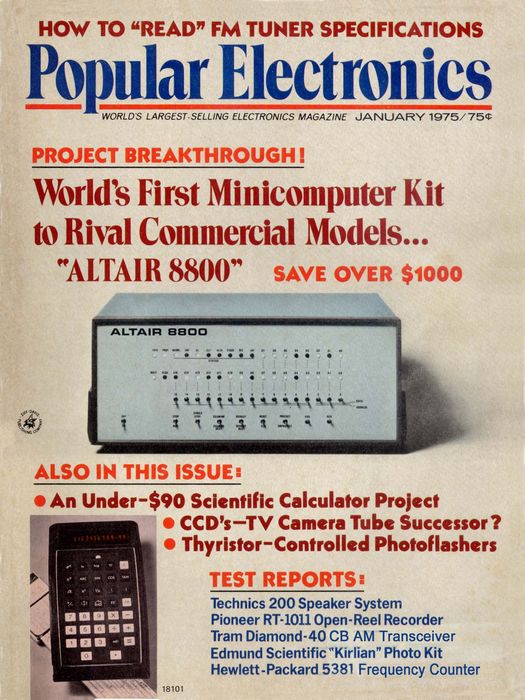 10 Важнейших стадий развития персональных компьютеров
10 Важнейших стадий развития персональных компьютеров «Мать всех демонов», 1968 год...
-
 10 Вариантов будущего через тысячу лет
10 Вариантов будущего через тысячу лет Будущее с инопланетянами — почему бы и нет? Кое-какие уверены, что инопланетяне уже среди нас...
Немного интересного:
-
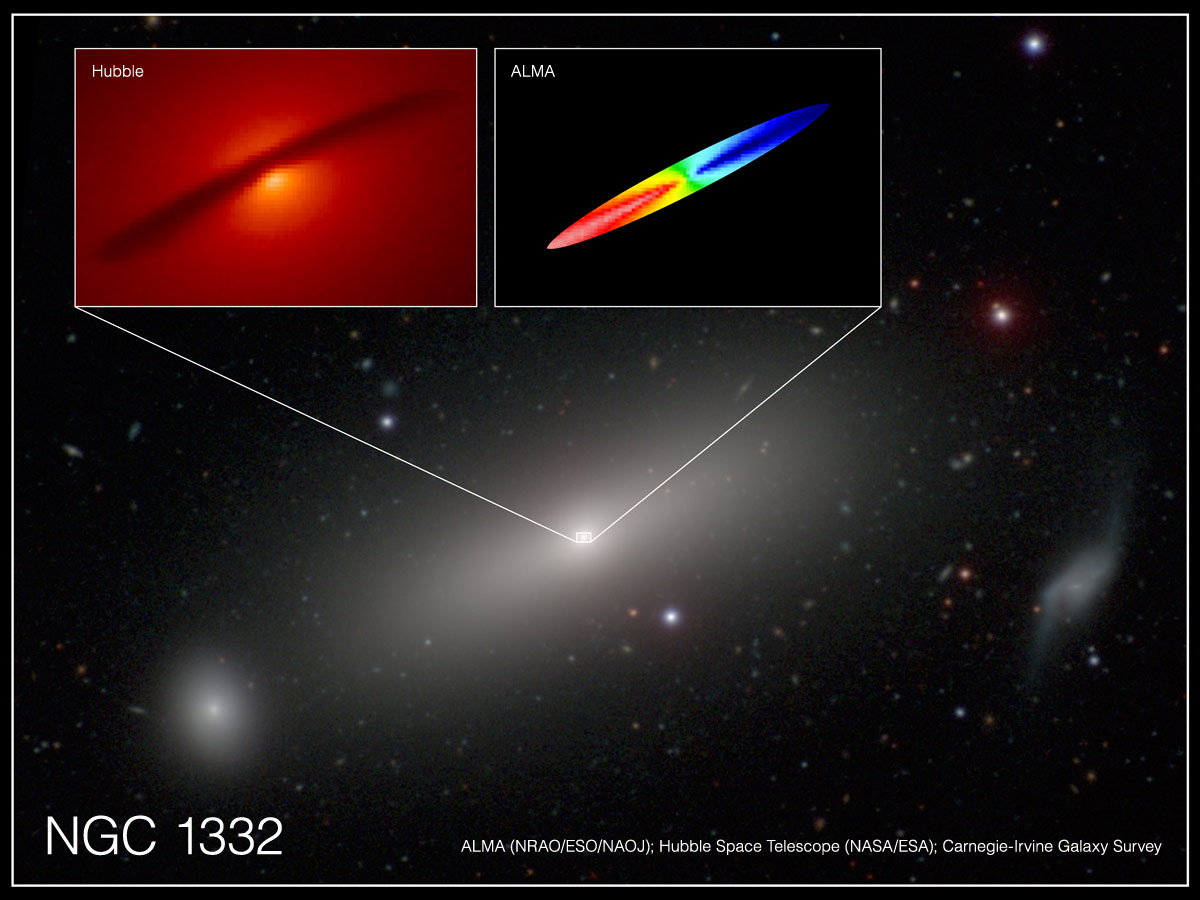 Астрофизики «взвесили» черную дыру
Астрофизики «взвесили» черную дыру Масса черной дыры в центре галактики NGC 1332, удаленной на 73 миллиона световых лет от Почвы, измерена с рекордной точн...
-
 Россия сделала шаг к квантовым компьютерам
Россия сделала шаг к квантовым компьютерам В первый раз в Российской Федерации создан трудящийся кубит – базисный элемент, нужный для квантовых компьютеров...
-
 Песчаные бури на марсе – реальность
Песчаные бури на марсе – реальность Так как воздух Марса в 100 раз менее плотная, чем земная, ученые уверены в том, что лишь ветры-ураганы способны двигать ...
-
 Мини-дом на крыше prius
Мини-дом на крыше prius
Многие люди выбирают гибридный автомобиль благодаря экономичности и топливной эффективности...
-
 Ученые создают пришельцев. без паники
Ученые создают пришельцев. без паники Интернациональная группа исследователей создала бактерию, ДНК которой содержит вещество, несуществующее на Земле...
-
Система управления
16.11.2012
 В мире моделей
В мире моделей -

С новинками разработки изготовления авиамоделей, применямой моделистами ГДР из города Эрфурта, отечественный издание знакомил читателей в № 6 за 1977 год. Сейчас мы говорим о прекрасно зарекомендовавшей себя в работе уникальной совокупности управления стабилизаторами моделей планеров. Сохраняем надежду, что советские авиамоделисты с интересом ознакомятся с конструкцией механизма управления и заберут его на «оружие» в собственной практической деятельности.
Сейчас у радиоуправляемых моделей планеров все чаще видится Т-образное и V-образное (рис. 1) оперение. Такая схема имеет определенные преимущества перед классической хорошей: важно, например, что высоко расположенный стабилизатор меньше подвержен поломкам при посадке. Отечественные авиамоделисты вычисляют эту схему самая удачной.
Предлагаем два варианта привода для руля высоты V-образпого стабилизатора: рычажный (рис. 2) и ползунковый (рис. 3).
Рис.
1. V-образное хвостовое оперение модели планера.
Рис. 2. Схема рычажного привода:
1 — тяги, 2 — тяги к совокупности управления 3 — сервомотор боковых рулей, 4 — серво мотор руля высоты.
")
Рис.
3. Привод при помощи направляющих:
1 — сервомотор рулей высоты, 2 — штанга, 3 — вилки, 4 — штанги привода к совокупности управления, 5 — сервомотор боковых рулей, 6 — направляющая сервомотора.
Рис. 4. Компоновка рычажного привода
Рис.
5. Размещение аппаратуры ползункового типа на модели.
Первый эргономичнее использовать для рулевых машинок с вертикальными валами, оканчивающимися двуплечими рычагами либо круглыми муфтами с отверстия ми. Дифференциальный механизм привода складывается из двух расположенных приятель над втором рычагов, подвижно вакрепленных на оси, эксцентрично установленной в муфте (рычаге) правой рулевой машинки (см. рис. 2).
Величина смещения оси зависит оттребуемого перемещения рулевой штанги. К свободным финишам пластмассовых либо железных рычагов управления прикреплены соединительные тяги. У этого варианта имеется то преимущество, что рулевые машинки возможно прочно и надежно закрепить в фюзеляже модели на случай неудачной (резкой) посадки.
Второй вариант пригоден для машинок с рулевым рычагом, закрепленным па горизонтальном валу (см. рис. 3) и имеющим продольное перемещение.
Рулевая машинка устанавливается в направляющих и может перемещаться в ту либо другую сторону посредством штанги. Особенное внимание обратите на то, дабы перемещение происходило легко и без люфта.
Оба варианта управления V-образным стабилизатором прекрасно зарекомендовали себя на практике.
компоновка и Размещение радиоаппаратуры продемонстрированы на картинках 4 и 5.
Г. МИЛЬ, А. ШРАМ, ГДР
Случайные записи:
Видео-урок «Система управления персоналом»
Похожие статьи, которые вам понравятся:
-
Системы спасения моделей ракет
Как обеспечить надежную и безаварийную посадку моделей ракет? Над ответом данной технической задачи бьются многие моделисты. По данным статистики более…
-
Nissan разрабатывает автономную систему рулевого управления в чрезвычайных ситуациях
Кроме того самые передовые разработки развиваются неспешно. Разумеется, что разные совокупности независимого управления – первые шаги на пути внедрения…
-
В 2013 году автомобили infinity оборудуют электрическим управлением
Машины, пребывав на острие технологического прогресса, в некоторых вопросах остаются весьма консервативными. К примеру, самые современные транспортные…
-
Создана система искусственного интеллекта, позволяющая автомобилям-роботам ориентироваться по карам
В соответствии с имеющимся прогнозам к 2035 году на дорогах во всем мире будет пребывать около 21 миллиона машин-роботов. Для увеличения уровня…
-